
I’m a robotics PhD student at Indiana University in Bloomington, in the Vehicle Autonomy & Intelligence Lab, advised by Professor Lantao Liu. My focus is planning and control for autonomous systems.
My research began in field robotics — terrain traversability analysis and autonomous navigation over uneven, unstructured terrain. It now centers on planning and control for autonomous racing, pushing full-scale race cars to the limits of speed and control. I’m the current lead of the IU-Luddy Autonomous Racing team, which competes in the Indy Autonomous Challenge.
Reach me at hjardali@iu.edu, or find me on Google Scholar, LinkedIn, and GitHub.
Timeline
- Jun 2026 Safe Overtaking for Autonomous Racing Using Hierarchical Optimization and Learning-Based Control accepted to IROS 2026.
- Jan 2026 LPV-MPC for Lateral Control in Full-Scale Autonomous Racing accepted to ICRA 2026.
- Jul 2025 Finished 4th of 8 teams at the Indy Autonomous Challenge race, WeatherTech Raceway Laguna Seca.
- Jul 2025 From Zero to High-Speed Racing: An Autonomous Racing Stack presented at ISER 2025.
- Jan 2025 IAC time-trial at the Las Vegas Motor Speedway — top speed 163 mph.
- Nov 2024 Preprint: Minimalistic Autonomous Stack for High-Speed Time-Trial Racing.
- Sep 2024 Worked on the planning and control modules for the IU-Luddy Autonomous Racing team’s IAC debut at the Indianapolis Motor Speedway — 124 mph in our first race.
- May 2024 Two papers at ICRA 2024 on mapless navigation over uneven terrain.
- Spring 2024 Interned with Code 19 Racing in the Abu Dhabi Autonomous Racing League (A2RL).
- Jul 2023 Autonomous Navigation, Mapping and Exploration with Gaussian Processes at RSS 2023.
- Fall 2022 Joined Indiana University as a PhD researcher in the Vehicle Autonomy & Intelligence Lab.
- May 2022 Graduated from the Lebanese American University with a B.E. in Mechatronics Engineering, with distinction.
- Fall 2021 Interned at BMW Group, Munich — logistics robotics.
- Spring 2019 Erasmus exchange at Politecnico di Torino, Turin.
Publications
Click a title to open the paper. All work is also on my Google Scholar profile.
-
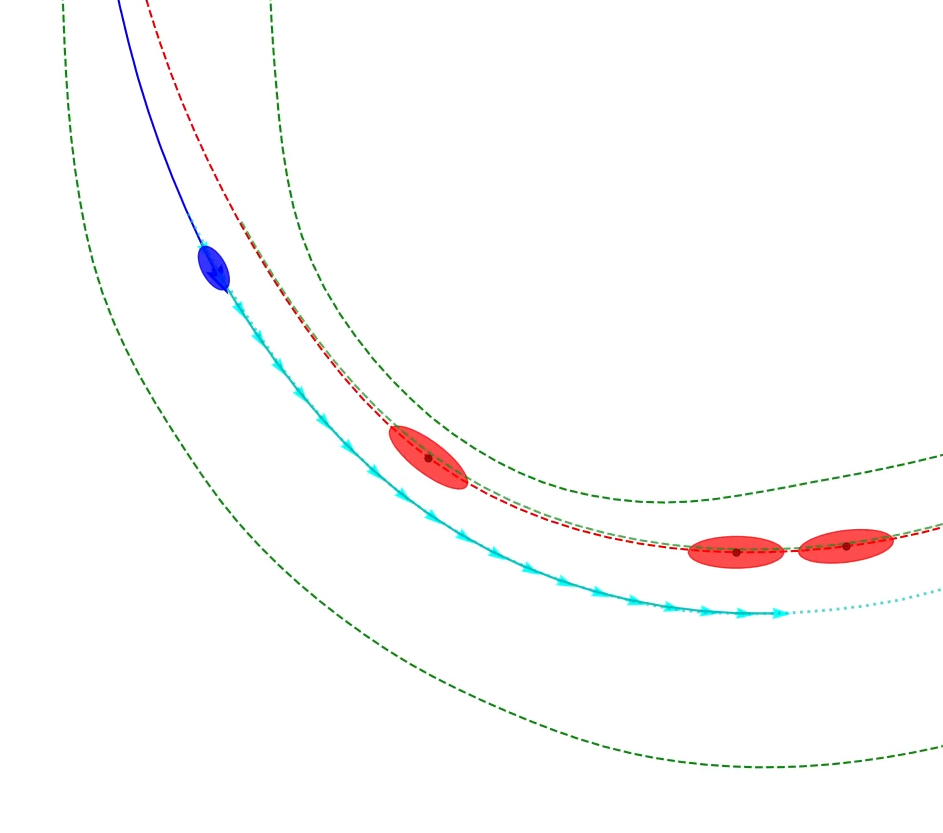 Safe Overtaking for Autonomous Racing Using Hierarchical Optimization and Learning-Based Control
Safe Overtaking for Autonomous Racing Using Hierarchical Optimization and Learning-Based Control